| 功能块 | MC_MoveCircularAbsolute | ||
|---|---|---|---|
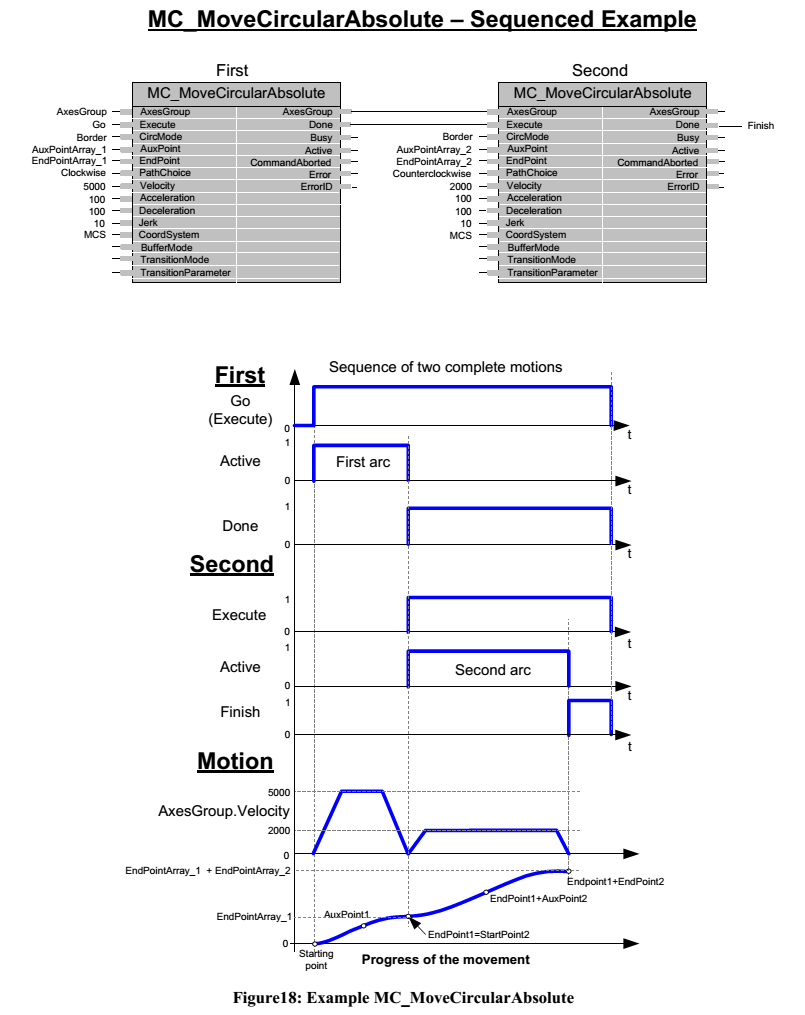
| 命令轴群之工具中心点自当前位置进行圆周插补运动。终点和辅助点在指定的坐标系统中为绝对定义(终点和辅助点的定义取决于所选的 CircMode 模式)。 | |||
| VAR_IN_OUT | |||
| B | GroupIn | AXES_GROUP_REF | 轴组的参考,参考以零为起点,最多可有 32 个轴组。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升边缘开始运动。 |
| V | ContinuousUpdate | BOOL |
若为 TRUE,则当功能块 (FB) 正在执行且参数值正被更新时,FB 将使用新值;若为 FALSE,则 FB 不会使用新值。 注意:不支援此参数。 |
| B | CircMode | MC_CircMode | 指定输入讯号 AuxPoint 的定义。 |
| B | AuxPoint | ARRAY [0..63] OF LREAL | 指定坐标系统中每个维度的绝对位置阵列 [0..63]。 |
| B | EndPoint | ARRAY [0..63] OF LREAL | 指定坐标系统中每个维度的绝对位置阵列 [0..63]。 |
| E | PathChoice | MC_CircPathChoice | 路径的选择。 |
| E | Velocity | LREAL | 定义路径中坐标系统路径的最大速度。永远为正值,非必要到达,[单位/每秒]。 |
| E | Acceleration | LREAL | 最大加速度。永远为正值,非必要到达,单位由 MC_ProfileType 决定,为 [单位/每秒2] 或 [每秒]。 |
| E | Deceleration | LREAL | 最大加速度。永远为正值,非必要到达,单位由 MC_ProfileType 决定,为 [单位/每秒2] 或 [每秒]。 |
| E | Jerk | LREAL | 最大加加速度,永远为正值,非必要到达,单位由 MC_ProfileType 决定,为 [单位/每秒3] 或 [每秒]。 |
| E | CoordSystem | MC_CoordSystem | 坐标系统。 |
| E | BufferMode | MC_BufferMode | 定义如何融合两功能块的速度。 |
| E | TransitionMode | MC_TransitionMode | 当前未插入转换曲线。 |
| E | TransitionParameter | ARRAY [0..63] OF LREAL | 转换模式的附加参数,若将 TransitionMode 设为 mcNone,则此参数无效。 |
| VAR_OUTPUT | |||
| B | Done | BOOL | 所有轴已达到命令之终点位置。 |
| E | Busy | BOOL | 功能块未结束。 |
| E | Active | BOOL | 功能块控制轴组。 |
| E | CommandAborted | BOOL | 命令被另一个命令中止。 |
| B | Error | BOOL | 功能块中出现错误的讯号。 |
| E | ErrorID | MC_Error | 错误识别。 |
|
|||
| MC_MoveCircularAbsolute | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | Execute | Done | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| MC_CircMode | CircMode | Active | BOOL | |||
| ARRAY [0..63] OF LREAL | AuxPoint | CommandAborted | BOOL | |||
| ARRAY [0..63] OF LREAL | EndPoint | Error | BOOL | |||
| MC_CircPathChoice | PathChoice | ErrorID | MC_Error | |||
| LREAL | Velocity | |||||
| LREAL | Acceleration | |||||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_CoordSystem | CoordSystem | |||||
| MC_BufferMode | BufferMode | |||||
| MC_TransitionMode | TransitionMode | |||||
| ARRAY [0..63] OF LREAL | TransitionParameter | |||||